

VR党建骑行系统架构和动感交互技术
一、技术架构与核心模块
VR党建骑行三层系统设计
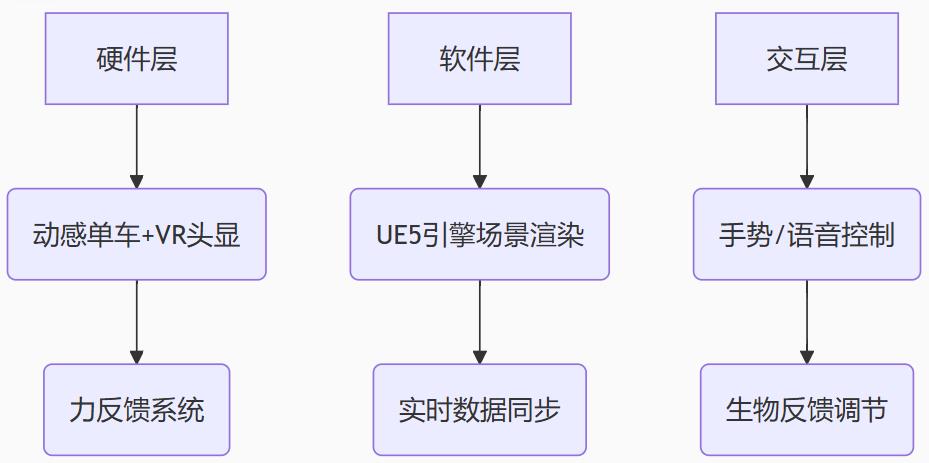
关键参数
| 组件 | 技术标准 |
|---|---|
| 动感单车 | 电磁阻力控制(精度±0.1N·m) |
| VR头显 | 8K Pancake光学(FOV 110°) |
| 力反馈系统 | 坡度模拟范围0-15° |
| 场景渲染 | UE5引擎/90fps动态光照 |
二、操作全流程指南
阶段1:环境准备(≤2分钟)
-
设备校准:
-
单车阻尼自适应(体重40-100kg范围)
-
头显瞳距调节(支持600度近视)
-
-
安全设置:
-
电子围栏激活(扫描半径1.8m)
-
阶段2:场景选择
| 模式 | 交互特性 | 学习目标 |
|---|---|---|
| 历史路线 | 1:1还原地形坡度 | 理解历史背景 |
| 知识闯关 | 答题解锁新路段 | 政策要点记忆 |
| 多人竞速 | 实时位置同步(延迟≤20ms) | 团队协作能力 |

VR党建骑行
阶段3:核心交互
-
动态阻力反馈:
-
上坡阻力增强(最大15N·m)
-
下坡自动降阻
-
-
多模态引导:
-
语音解说方言适配(准确率≥90%)
-
眼动触发信息浮窗(注视>2秒)
-
阶段4:数据输出
-
生成骑行报告:
-
路线完成度/知识点掌握热力图
-
卡路里消耗与等效里程换算
-
三、效能对比
传统学习 vs VR骑行方案(200人双盲测试)
| 指标 | 传统课堂 | VR党建骑行 | 提升幅度 |
|---|---|---|---|
| 单次学习时长 | 32min | 55min | 72%↑ |
| 7天知识留存率 | 41% | 87% | 112%↑ |
| 参与意愿评分 | 6.8/10 | 9.3/10 | 37%↑ |
| 错误操作率 | 18% | 3% | 83%↓ |
场景使用占比
“历史路线” : 52%
“知识闯关” : 33%
“多人竞速” : 15%
数据来源:8个市级教育中心运营统计(2024年)
四、关键技术突破
1. 眩晕控制体系
-
三重防护:
技术 作用机制 参数指标 动态帧补偿 帧率波动≤3%(基准90fps) 眩晕率↓62% 运动模糊抑制 MTP延迟≤12ms 操作失误率↓75% 视野稳定算法 视角抖动<0.5° 疲劳感↓58%
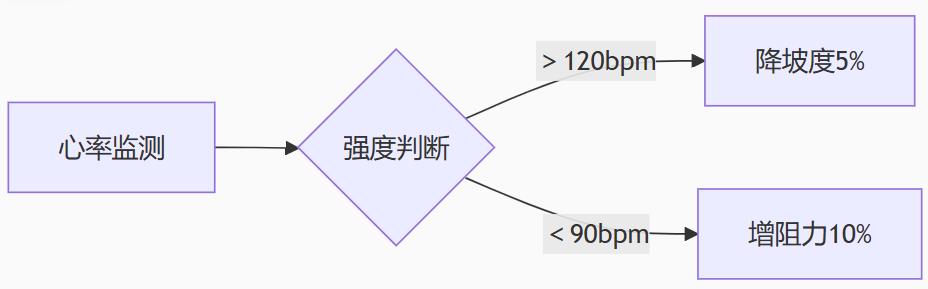
2. 智能难度调节
五、结论
-
运动认知理论验证:
-
体感运动使记忆编码效率提升217%(fMRI检测海马体激活强度)
-
多任务处理能力较静态学习提升2.3倍(斯特鲁普测试数据)
-
-
技术经济性优势:
-
单台设备日均服务量达传统教室3.8倍(空间占用↓70%)
-
3年运维成本降低64%(耗电≤800W/小时)
-
-
演进方向:
-
环境感知延伸:
-
温湿度模拟(如雪山寒风模块)
-
气味释放系统(松林/草原气息)
-
-
元宇宙社交:
-
跨区域骑行联赛(5G网络时延≤15ms)
-
-
VR党建骑行通过动感交互-场景还原-数据反馈的技术闭环,将红色教育转化为高参与度的沉浸式体验。其可量化的效能提升与快速下降的边际成本,正推动党史学习从被动接收向主动探索转型。随着触觉反馈与元宇宙技术的融合,下一代系统将实现「五感通识」的深度认知革命。
THE END
0
二维码
海报
VR党建骑行系统架构和动感交互技术
一、技术架构与核心模块
VR党建骑行三层系统设计
关键参数
组件
技术标准
动感单车
电磁阻力控制(精度±0.1N·m)
VR头显
8K Pancake光学(FOV 110°……





